full-stack • electronics • machine-learning • vlsi •
Shashank R 👋🏼
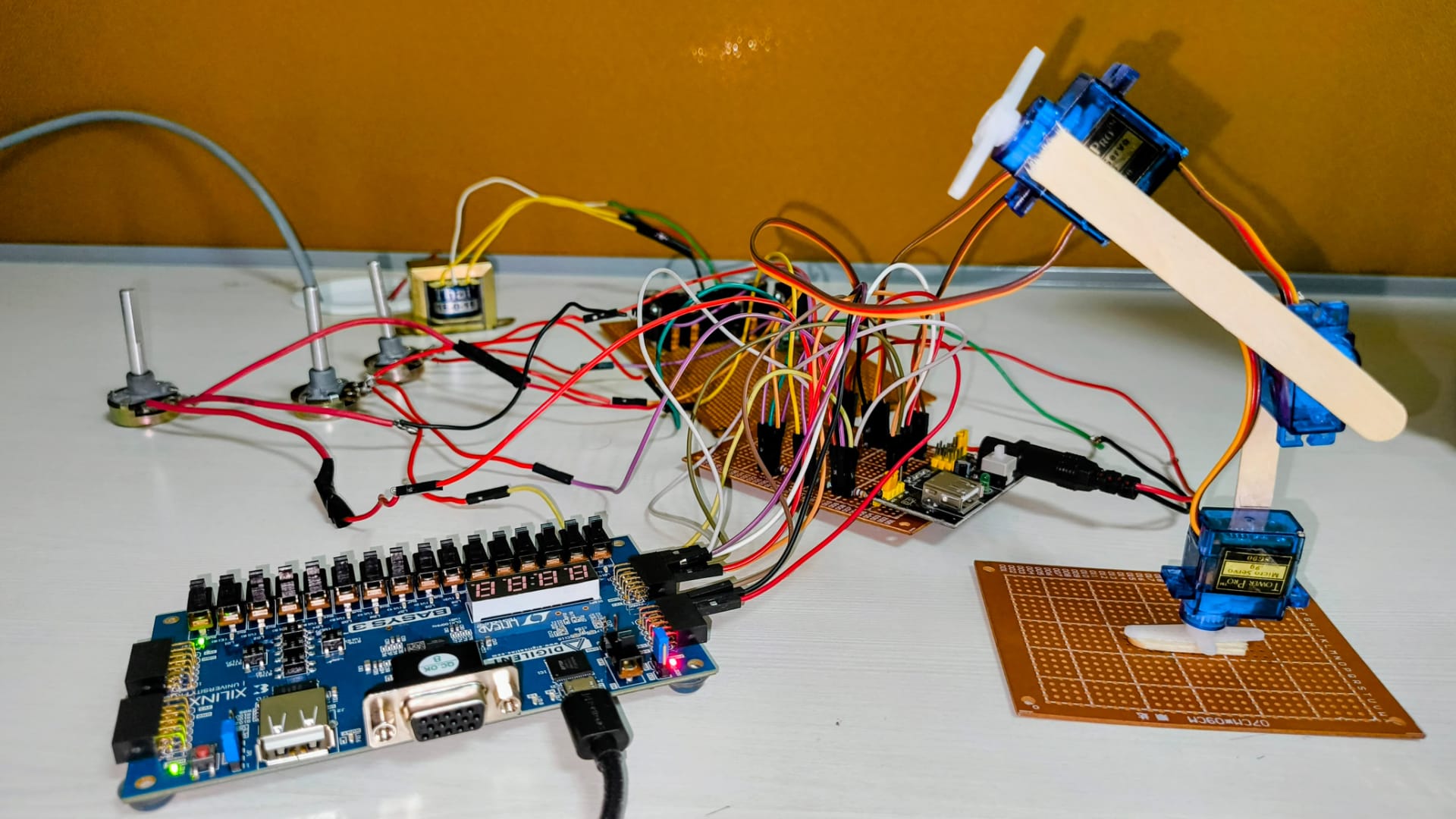
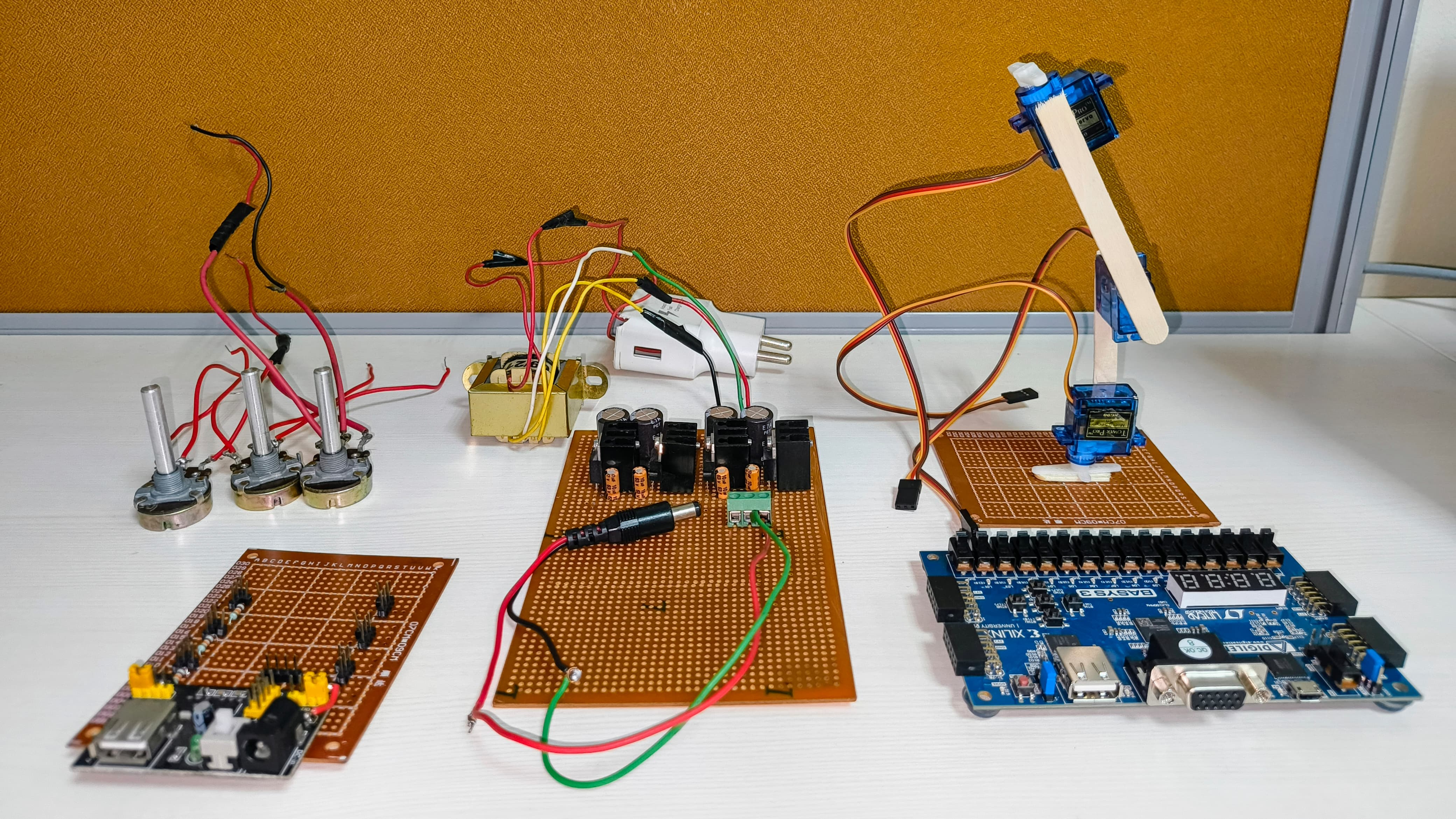
The FPGA-Based Robotic Arm project involves controlling the angular position of a servo motor-driven robotic arm using a potentiometer connected to the Basys3 FPGA. The potentiometer input is read through the FPGA’s onboard XADC (Analog-to-Digital Converter), which translates the analog voltage to a digital value that adjusts the servo angle in real time. This setup demonstrates efficient analog interfacing and precise control using digital hardware.
The team:
Techstack: